UWB高精度定位技術(shù) 原理、實(shí)現(xiàn)與數(shù)字技術(shù)服務(wù)
隨著物聯(lián)網(wǎng)、工業(yè)4.0和智能制造的快速發(fā)展,對(duì)室內(nèi)及復(fù)雜環(huán)境下的高精度位置信息需求日益增長(zhǎng)。超寬帶(Ultra-Wideband, UWB)技術(shù)憑借其厘米級(jí)的高精度、強(qiáng)抗干擾能力和低功耗等優(yōu)勢(shì),成為高精度定位領(lǐng)域的核心技術(shù)之一。本文將系統(tǒng)闡述UWB高精度定位的技術(shù)原理、系統(tǒng)實(shí)現(xiàn)源碼的關(guān)鍵考量,并探討其在數(shù)字技術(shù)服務(wù)中的廣闊應(yīng)用前景。
一、UWB高精度定位技術(shù)原理
UWB技術(shù)本質(zhì)上是一種利用納秒至皮秒級(jí)的非正弦波窄脈沖進(jìn)行數(shù)據(jù)傳輸?shù)臒o線通信技術(shù)。其定位核心原理主要基于以下兩種方法:
- 到達(dá)時(shí)間(TOA)與到達(dá)時(shí)間差(TDOA):
- TOA: 通過測(cè)量信號(hào)從標(biāo)簽(Tag)傳播到多個(gè)已知位置的基站(Anchor)的絕對(duì)時(shí)間,結(jié)合光速計(jì)算出距離,再利用三邊定位法解算標(biāo)簽坐標(biāo)。這要求所有設(shè)備間時(shí)鐘高度同步。
- TDOA: 測(cè)量信號(hào)到達(dá)不同基站的時(shí)間差,形成雙曲線交點(diǎn)來確定位置。此方法只需基站間時(shí)鐘同步,對(duì)標(biāo)簽時(shí)鐘要求較低,是主流方案之一。
- 到達(dá)角度(AOA): 利用天線陣列測(cè)量信號(hào)到達(dá)的入射角度,通過三角測(cè)量法定位。通常與TOA/TDOA結(jié)合使用以提升精度或減少基站數(shù)量。
UWB實(shí)現(xiàn)高精度的物理基礎(chǔ)在于其極寬的頻譜(通常>500MHz),使得時(shí)間分辨率極高,能夠精確捕捉脈沖的到達(dá)時(shí)刻,從而對(duì)抗多徑效應(yīng)(信號(hào)經(jīng)不同路徑反射)的能力顯著優(yōu)于窄帶系統(tǒng)。
二、UWB定位系統(tǒng)實(shí)現(xiàn)與源碼考量
一套完整的UWB高精度定位系統(tǒng)通常由硬件(UWB芯片/模塊、天線)、底層固件、定位算法和上層應(yīng)用軟件構(gòu)成。開源社區(qū)(如Decawave的DW1000芯片相關(guān)開源項(xiàng)目)為學(xué)習(xí)和研究提供了寶貴資源。系統(tǒng)實(shí)現(xiàn)的核心環(huán)節(jié)包括:
- 硬件驅(qū)動(dòng)與基礎(chǔ)測(cè)距: 源碼需實(shí)現(xiàn)UWB芯片的初始化、配置(信道、脈沖重復(fù)頻率、數(shù)據(jù)率等)以及核心的無線收發(fā)功能。關(guān)鍵是從原始信號(hào)中精確提取時(shí)間戳(如幀傳輸開始時(shí)刻PSTS、接收時(shí)刻PRXS)。
2. 雙向測(cè)距(TWR)協(xié)議實(shí)現(xiàn): 為抵消時(shí)鐘偏移,常采用單邊或雙邊雙向測(cè)距。源碼需精確控制報(bào)文(Poll, Response, Final)的發(fā)送、接收與時(shí)間戳記錄,并計(jì)算飛行時(shí)間(ToF)。示例偽代碼邏輯如下:
`c
// 簡(jiǎn)化的雙邊雙向測(cè)距(SDS-TWR)核心流程
Tag發(fā)送Poll報(bào)文,記錄發(fā)送時(shí)間T1;
Anchor接收Poll,記錄到達(dá)時(shí)間T2;
Anchor處理延遲后,在T3時(shí)刻發(fā)送Response報(bào)文;
Tag接收Response,記錄到達(dá)時(shí)間T4;
Tag發(fā)送Final報(bào)文(可選,用于進(jìn)一步校準(zhǔn));
通過交換時(shí)間戳,計(jì)算ToF = [(T4-T1) - (T3-T2)] / 2;
`
- 定位解算引擎: 獲得多個(gè)距離或時(shí)間差測(cè)量值后,需在源碼中實(shí)現(xiàn)定位算法。常用方法有:
- 最小二乘法: 解決非線性方程組,迭代求解最優(yōu)位置坐標(biāo)。
- 卡爾曼濾波(KF)或擴(kuò)展卡爾曼濾波(EKF): 融合歷史測(cè)量數(shù)據(jù)與運(yùn)動(dòng)模型,對(duì)動(dòng)態(tài)標(biāo)簽進(jìn)行實(shí)時(shí)、平滑的位置與速度估計(jì),是提升系統(tǒng)穩(wěn)定性和精度的關(guān)鍵。
- 數(shù)據(jù)融合與應(yīng)用接口: 將解算出的坐標(biāo)通過串口、Wi-Fi、以太網(wǎng)等上傳至服務(wù)器。源碼需提供清晰的API,供上層應(yīng)用(如可視化、業(yè)務(wù)邏輯)調(diào)用。
在開發(fā)中,需重點(diǎn)關(guān)注射頻校準(zhǔn)、天線延遲補(bǔ)償、時(shí)鐘漂移處理、多址接入防碰撞以及復(fù)雜的非視距(NLOS)環(huán)境識(shí)別與抑制算法,這些都是影響最終精度的工程難點(diǎn)。
三、UWB在數(shù)字技術(shù)服務(wù)中的賦能應(yīng)用
UWB高精度定位不僅是一項(xiàng)技術(shù),更是驅(qū)動(dòng)數(shù)字化轉(zhuǎn)型的關(guān)鍵服務(wù)能力:
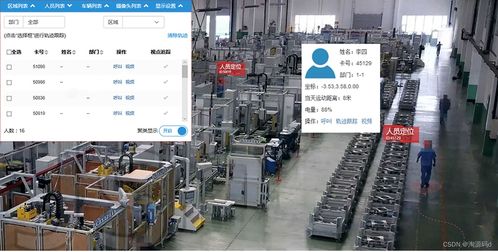
- 工業(yè)與制造: 在數(shù)字孿生、智慧工廠中,實(shí)時(shí)追蹤物料、AGV、工具及人員,優(yōu)化流程、提升安全、實(shí)現(xiàn)精細(xì)化管理和調(diào)度。
- 倉(cāng)儲(chǔ)物流: 實(shí)現(xiàn)無人倉(cāng)內(nèi)貨物、叉車的厘米級(jí)定位,與WMS、機(jī)器人系統(tǒng)聯(lián)動(dòng),大幅提升分揀、盤點(diǎn)效率和空間利用率。
- 智能建筑與空間管理: 在辦公樓、醫(yī)院、博物館提供智能導(dǎo)覽、資產(chǎn)追蹤、安全區(qū)域管控、能耗管理及基于位置的信息推送服務(wù)。
- 消費(fèi)電子與零售: 手機(jī)、手表等設(shè)備的UWB功能(如蘋果的AirTag、小米的“一指連”)開啟了智能門禁、無感支付、室內(nèi)導(dǎo)航及沉浸式互動(dòng)體驗(yàn)的新場(chǎng)景。
- 自動(dòng)駕駛與交通: 在車聯(lián)網(wǎng)(V2X)中,提供車輛間、車與基礎(chǔ)設(shè)施間的精確定位,增強(qiáng)自動(dòng)駕駛在隧道、停車場(chǎng)等GNSS失效環(huán)境下的感知能力。
###
UWB高精度定位系統(tǒng)的實(shí)現(xiàn),是從底層硬件驅(qū)動(dòng)到上層算法優(yōu)化的全棧技術(shù)集成。深入理解其物理原理與協(xié)議細(xì)節(jié),是編寫高效、穩(wěn)定源碼的基礎(chǔ)。而將其封裝為可靠、可擴(kuò)展的數(shù)字技術(shù)服務(wù),則能真正釋放其在各行各業(yè)中的巨大潛力,成為構(gòu)建未來智能化數(shù)字空間不可或缺的感知基石。隨著技術(shù)標(biāo)準(zhǔn)化和生態(tài)的成熟,UWB必將在更廣闊的領(lǐng)域推動(dòng)精準(zhǔn)位置數(shù)據(jù)的價(jià)值變現(xiàn)。
最新產(chǎn)品